The discovery of decision strategies is an essential part of creating effective cognitive tutors that teach planning and decision-making skills to humans. In the context of bounded rationality, this requires weighing the benefits of different planning operations compared to their computational costs. For small decision problems, it has already been shown that near-optimal decision strategies can be discovered automatically and that the discovered strategies can be taught to humans to increase their performance. Unfortunately, these near-optimal strategy discovery algorithms have not been able to scale well to larger problems due to their computational complexity.
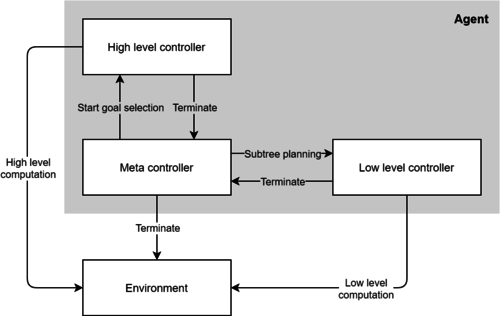
In this talk, we will present recent work at the Rationality Enhancement Group to overcome the computational bottleneck of existing strategy discovery algorithms. Our approach makes use of the hierarchical structure of human behavior by decomposing sequential decision problems into two sub-problems: setting a goal and planning how to achieve it. An additional metacontroller component is introduced to switch the current goal when it becomes beneficial. The hierarchical decomposition enables us to discover near-optimal strategies for human planning in larger and more complex tasks than previously possible. We then show in online experiments that teaching the discovered strategies to humans improves their performance in complex sequential decision-making tasks.